Drawing inspiration from the human tactile senses,
Youcan Yan
, a postdoctoral researcher at the CNRS
Montpellier Laboratory for Computer Science, Robotics, and Microelectronics
(LIRMM – CNRS/University of Montpellier) and
Abderrahmane Kheddar
, who serves as a research director at LIRMM under the CNRS, has created a novel electronic skin. This innovation allows robots to sense forces across three dimensions. The device is straightforward both in production and calibration processes, potentially leading to more advanced and secure robotic systems in medical fields.
Throughout daily activities, people frequently depend on tactile sensations to engage with their surroundings. Conversely, perceiving forces has consistently posed difficulties for robotic systems. Often, these sensory devices feature intricate designs and necessitate rigorous calibrations, which restricts their usage.
To address these difficulties, researchers at LIRMM found motivation in biological processes. Leveraging the characteristics of human skin along with the self-separation property of the Halbach array, they created a versatile magnetic sensor following two years of investigation. This innovative device has the capability to discern forces across three dimensions. The project received support as well.
Key Challenge “Human-Centered Robotics”
supported by the Occitanie region and CNRS.
The sensor’s architecture is straightforward, featuring three distinct layers. The initial layer comprises a bendable magnetic material that distorts when touched, thereby modifying the magnetic field. In between lies an elastic intermediary layer serving as padding, followed by an end layer outfitted with both a printed circuit board and Hall effect sensors designed to monitor alterations in the magnetic field. Such a setup enables the sensor to separately gauge normal (vertical) and shear (horizontal) pressures.
Their article published in
,
demonstrates multiple examples of this proprietary technology. When embedded within an artificial knee joint, the sensor enabled researchers to manage force distribution throughout motion—insights that could assist healthcare providers in gaining deeper understanding and improving treatments for joint problems. In yet another test, the sensor facilitated a robotic system’s ability to prepare coffee. Through precise application of pressure and gliding actions on the sensor, the robot acquired a series of maneuvers and executed them independently, including gripping, adding water, and mixing. Additionally, the sensor’s responsiveness permits robots to manipulate extremely delicate items like eggs with care, preventing damage.
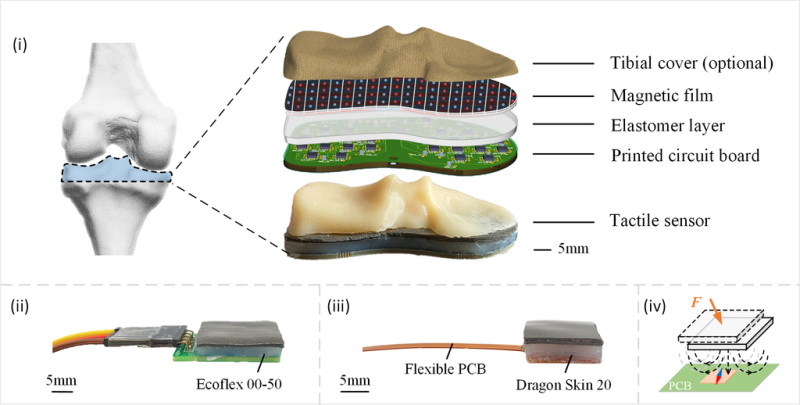
Designs for the sensory sensor (three distinct versions) along with their operational principles.
© Youcan Yan
These accomplishments carry substantial weight. For instance, incorporating such sensory components into robots might result in devices that can execute intricate maneuvers with near-human accuracy due to their enhanced responsiveness and adaptability. Within the medical field, intelligent prosthetic limbs or knee supports could gain advantages from immediate force feedback mechanisms, thus enhancing both security and performance. Additionally, because this sensor is straightforward to produce and calibrate, it has potential for widespread use beyond research settings, bringing sophisticated touch-sensing technology closer to daily life.
In the future, the LIRMM group intends to improve the sensor by enhancing its materials and incorporating it into advanced systems such as humanoid robots. This development aims to close the capability gap between human agility and robot accuracy, reshaping machine interaction within their surroundings.
For more information:
Yan, Y., Zermane, A., Pan, J.
et al.
Soft skin featuring taxels capable of independent three-axis force sensing.
Nat Mach Intell
6
, 1284-1295 (2024).
https://doi.org/10.1038/s42256-024-00904-9
Source:
CNRS INS2I
Similar topics
-
This robot horse can navigate through any terrain 🐎
-
When spherical robots communicate via eye movements 🌟
-
These robots can alter their form and stiffness as needed ⚙️
-
This robot gains “conscious awareness” by examining its reflection in a mirror 🤖
